
Ô nhiễm môi trường biển là một trong những vấn đề toàn cầu quan trọng nhất. Nó ảnh hưởng đến môi trường, kinh tế, an ninh, sức khỏe và văn hóa. Hiện tại, các đại dương ngày nay chứa từ 26-66 triệu tấn chất thải, với khoảng 94% nằm ở đáy biển.
Thực tế, nhựa không dễ bị phân hủy, vì vậy chúng có khả năng tồn tại trong biển hàng trăm năm. Các dự báo cho rằng, sản lượng rác thải nhựa sẽ tăng gấp 4 lần vào năm 2050, vì thế chúng ta sẽ gặp khó khăn lớn nếu không hành động ngay từ bây giờ.
Chính vì thế mà dự án SeaClear này đã ra đời. Về cơ bản dự án bao gồm bốn phương tiện độc lập nhưng phối hợp cùng nhau: một thiết bị bay không người lái, hai phương tiện điều khiển từ xa dưới nước (ROV) và một tàu mặt nước không người lái sẽ đóng vai trò như một tàu mẹ. Thông qua hệ thống cáp rốn, dây cáp sau sẽ cung cấp điện cho hai ROV, cộng với nó sẽ sử dụng một máy tính tích hợp để xử lý dữ liệu được truyền.
Hệ thống này sẽ được triển khai chủ yếu ở các khu vực ven biển, vì đó là nơi phần lớn rác từ các con sông đi vào đại dương.
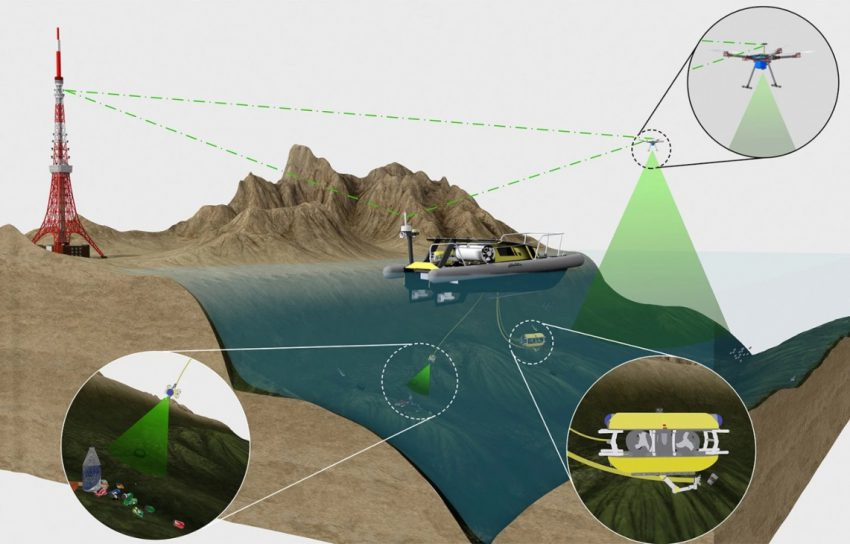
Sơ đồ hệ thống SeaClear
Ban đầu, thiết bị bay không người lái và một trong hai phương tiện ROV sẽ được sử dụng để phát hiện rác dưới khu vực đáy biển. Bộ đôi hệ thống này được đánh giá có thể phát hiện và phân loại rác thải dưới nước chính xác ở mức 80%.
Sau khi nhận tín hiệu, phương tiện ROV thứ hai sau đó sẽ di chuyển lặn xuống và đi dọc theo đáy biển, sử dụng một bộ kẹp và thiết bị hút được thiết kế riêng để thu gom rác thải với tỷ lệ thu gom thành công lên đến 90%. Phần rác này sẽ được đưa trở lại tàu mẹ nổi và được xử lý trong thùng trung tâm.

Tàu mặt nước không người lái trong hệ thống thu gom rác dưới đại dương
Các thuật toán dựa trên trí tuệ nhân tạo sẽ được sử dụng để giúp máy bay không người lái và ROV đầu tiên phân biệt giữa rác và động vật biển. Các thuật toán này cũng sẽ cho phép ROV thứ hai phân biệt giữa rác và san hô hoặc các cấu trúc tự nhiên khác.
Một phiên bản nguyên mẫu của SeaClear đã được thử nghiệm vào mùa xuân này ở độ sâu từ 20 đến 30 mét tại cảng Hamburg, Đức và dọc theo bờ biển Dubrovnik, Croatia. Những địa điểm đó được chọn vì chúng khá khác biệt với nhau. Cảng là nơi nhiều máy móc công nghiệp, đông đúc và nước có nhiều phù sa, trong khi bờ biển Croatia yên bình hơn, nước trong và hướng đến khách du lịch.
Thạc sĩ Cosmin Delea, quản lý dự án cho biết, nước ở cảng Hamburg rất khó phân tích vì độ đục và tầm nhìn thấp. Hơn nữa, hiện nay chưa có thống kê rõ ràng về chủng loại và lượng rác thải dưới nước tại khu vực cảng.
“Ở Hamburg, chúng tôi đang cố gắng kết hợp dữ liệu từ các cảm biến khác nhau khi lập bản đồ thảm rác biển để đánh giá loại rác dưới biển nào sẽ được tìm thấy ở những vùng nước này. Chúng tôi đang sử dụng chủ yếu cảm biến âm thanh vì tầm nhìn hạn chế”, anh Delea nói.
Còn ở khu du lịch biển Dubrovnik, nhóm dự án không thể ngăn cản sự hiếu kỳ của người dân khi họ tiếp cận các phương tiện nhặt rác. “Vì thế, tại Dubrovnik, chúng tôi sẽ lắp đặt các cơ chế an toàn bổ sung trên máy bay không người lái, với một số hỗ trợ từ các cảm biến trên tàu mẹ. Mục tiêu là bảo đảm an toàn và ngăn ngừa va chạm”, anh Delea cho biết. Dự án sẽ tiếp tục thử nghiệm ở Dubrovnik vào cuối mùa hè.
Các đối tác chung tay phát triển dự án này bao gồm Trung tâm Dịch vụ Logistics Fraunhofer của Đức; trường Đại học Kỹ thuật Munich, SubSea Tech Marseille; Cảng vụ Hamburg; và Cơ quan Phát triển DUNEA Dubrovnik.
Trước đó, năm 2019, Ocean Cleanup, một tổ chức phi lợi nhuận của Hà Lan đã thiết kế thành công hệ thống khổng lồ nhằm thu gom rác thải nhựa trên bề mặt đại dương.
Dương Bình (t/h)




![[VIDEO] Tại sao phải đạt Net Zero vào năm 2050?](https://mtcs.1cdn.vn/thumbs/540x360/2025/07/05/thumbnail-you-tube-copy(1).jpg "[VIDEO] Tại sao phải đạt Net Zero vào năm 2050?")
![[VIDEO] Hoa ban trên đường Phạm Văn Đồng đang “kêu cứu”](https://mtcs.1cdn.vn/thumbs/540x360/2025/07/05/thumbnail-you-tube-copy.jpg "[VIDEO] Hoa ban trên đường Phạm Văn Đồng đang “kêu cứu”")

![[VIDEO] Hàng không Việt Nam tham gia cơ chế giảm phát thải carbon](https://mtcs.1cdn.vn/thumbs/540x360/2025/07/05/tn2.jpg "[VIDEO] Hàng không Việt Nam tham gia cơ chế giảm phát thải carbon")
![[Góc nhìn tuần qua]: Mục tiêu Net Zero của Việt Nam - Hành trình xanh hướng tới tương lai bền vững](https://mtcs.1cdn.vn/thumbs/540x360/2025/07/05/gc.jpg "[Góc nhìn tuần qua]: Mục tiêu Net Zero của Việt Nam - Hành trình xanh hướng tới tương lai bền vững")








.png "Nghiên cứu mới: Ô nhiễm không khí có thể gây đột biến DNA dẫn đến ung thư phổi ở người không hút thuốc")





